Media Summary: ICRA 2018 Spotlight Video Interactive Session Wed PM Pod R.8 Authors: Wang, Chaoqun; Li, Teng; de Silva, Clarence; Meng, ... Vision-language navigation (VLN) has emerged as a promising paradigm, enabling Authors: Sebastián Barbas Laina, Simon Boche, Sotiris Papatheodorou, Simon Schaefer, Jaehyung Jung, Helen Oleynikova, ...
Efficient Mobile Robot Exploration With - Detailed Analysis & Overview
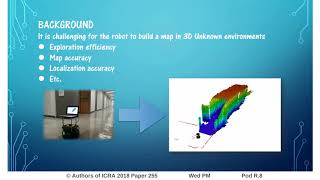
ICRA 2018 Spotlight Video Interactive Session Wed PM Pod R.8 Authors: Wang, Chaoqun; Li, Teng; de Silva, Clarence; Meng, ... Vision-language navigation (VLN) has emerged as a promising paradigm, enabling Authors: Sebastián Barbas Laina, Simon Boche, Sotiris Papatheodorou, Simon Schaefer, Jaehyung Jung, Helen Oleynikova, ... Efficient autonomous exploration using GMRF model Efficient Autonomous Robotic Exploration with Region Exploration Path Planning for a Mobile Robot Expressing Working Environment By Grid Points
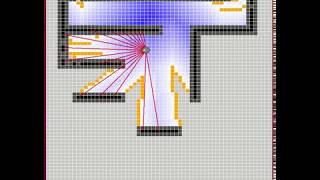
Video demonstration showing example simulation trials and real-world demonstrations for the below paper. Title: CQLite: ...