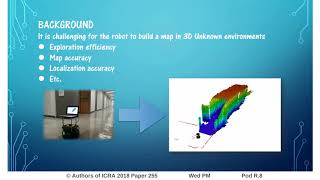
Media Summary: Efficient autonomous exploration using GMRF model ICRA 2018 Spotlight Video Interactive Session Wed PM Pod R.8 Authors: Wang, Chaoqun; Li, Teng; de Silva, Clarence; Meng, ... Michael Kaess Assistant Research Professor, Carnegie Mellon University, Robotics Institute Robust and
Efficient Autonomous Exploration Using Gmrf - Detailed Analysis & Overview
Efficient autonomous exploration using GMRF model ICRA 2018 Spotlight Video Interactive Session Wed PM Pod R.8 Authors: Wang, Chaoqun; Li, Teng; de Silva, Clarence; Meng, ... Michael Kaess Assistant Research Professor, Carnegie Mellon University, Robotics Institute Robust and This video presents our recent results on