Media Summary: Dynamic Task Allocation in Robot Swarms with Limited Buffer and Energy Constraints This video presents the RA-L (ICRA 2026) paper: A Blockchain Framework for Equitable and Secure 18th IEEE MCSoc 2025 - Regular Presentation.
Dynamic Task Allocation In Robot - Detailed Analysis & Overview
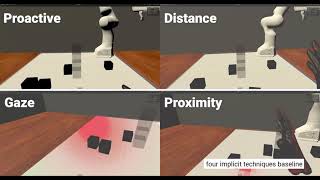
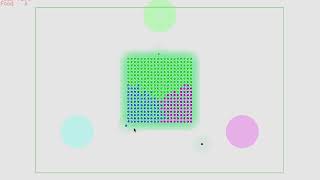
Dynamic Task Allocation in Robot Swarms with Limited Buffer and Energy Constraints This video presents the RA-L (ICRA 2026) paper: A Blockchain Framework for Equitable and Secure 18th IEEE MCSoc 2025 - Regular Presentation. Supplementary material of the paper "A human-centered In this simulation, Kilobots choose the nearest S. Park, Y. D. Zhong, and N. E. Leonard, "Multi-