Media Summary: This video presents a learning framework to estimate ... comportamento e Os experimentos na foram desenvolvidos em more info: This is the presentation of our paper ( C.
Task Allocation In Two Agent - Detailed Analysis & Overview
This video presents a learning framework to estimate ... comportamento e Os experimentos na foram desenvolvidos em more info: This is the presentation of our paper ( C. Supplementary material of the paper "A human-centered This video presents a distributed comprehensive framework enabling a networked multi-robot system to serve time-varying ... Video attachment to our paper ( [1] C. Henkel, J. Abbenseth, and M. Toussaint, “The Combined ...
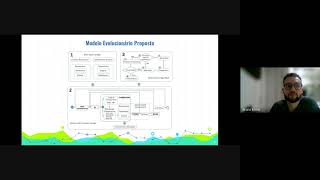
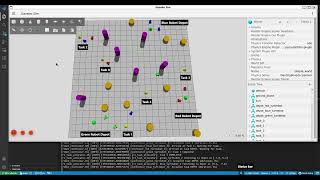
In order to illustrate the situated multi- This video presents the capabilities of our simulation model, which contains a Multi- ScaSMATA is a library of algorithms which aim at allocating some This is a video capture of simulations conducted for the novel nature-inspired multi-robot