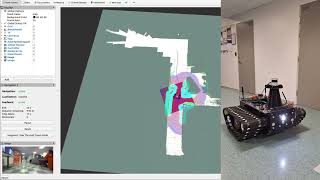
Media Summary: Discover how our mobile robot myAGV leverages 만든이 : 군산대학교 소프트웨어학부 스마트모빌리티 전공 정다훈. In this video, we are testing the autonomous waypoint navigation capabilities of our Snower, including
Dynamic Obstacle Avoidance Using Ros2 - Detailed Analysis & Overview
Discover how our mobile robot myAGV leverages 만든이 : 군산대학교 소프트웨어학부 스마트모빌리티 전공 정다훈. In this video, we are testing the autonomous waypoint navigation capabilities of our Snower, including GitHub Repository: Project Description This project implements a Welcome back to YOI Robotics! In this tutorial, we take your TurtleBot3 navigation to the next level — by adding This is the second video that are testing the autonomous waypoint navigation capabilities of our Snower (
Creativity is intelligence having fun .. Lab is always fun playing In this tutorial I did several experiments to train a robot to avoid This video shows a mobile robot being controlled by a minimal plastic Spiking Neural Network (SNN) inside a In this demo, I set up two turtlebot3 robots to perform navigation task while