Media Summary: In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ... In this tutorial I did several experiments to train a robot to avoid Today's autonomous drones have reaction times of tens of milliseconds, which is not enough for navigating fast in complex ...
Dynamic Obstacle Avoidance For Real - Detailed Analysis & Overview
In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ... In this tutorial I did several experiments to train a robot to avoid Today's autonomous drones have reaction times of tens of milliseconds, which is not enough for navigating fast in complex ... MPC with Velocity Obstacle for Dynamic Obstacles This work was carried out by Bradley Kohler, Ya-Jun Pan and Robert Bauer at the Advanced Control and Mechatronics Lab, ... Dynamic Obstacle Avoidance for CDPRs with Mobile Bases via Sim-to-Real Reinforcement Learning
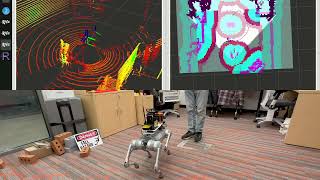
This video demonstrates how the robot, UGV (Unmanned Ground Vehicle) can detect and avoid any




![EVDodgeNet: Deep Dynamic Obstacle Dodging with Event Cameras [ICRA 2020]](https://i.ytimg.com/vi/k1uzsiDI4hM/mqdefault.jpg)