Media Summary: This lecture makes use of the concepts of attractors, repellors, and their bifurcations to enable a robotic agent to generate In this lecture I define some general concepts to characterize different approaches to Southwest Research Institute developed a robotics simulation package using Drake, a simulation tool for robotics. We also ...
Dynamic Motion Planning For Safe - Detailed Analysis & Overview
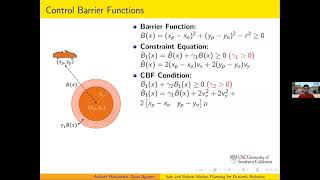
This lecture makes use of the concepts of attractors, repellors, and their bifurcations to enable a robotic agent to generate In this lecture I define some general concepts to characterize different approaches to Southwest Research Institute developed a robotics simulation package using Drake, a simulation tool for robotics. We also ... Sumeet Singh (Google), Hiroyasu Tsukamoto (Caltech), Brett Lopez (UCLA), Soon-Jo Chung (Caltech), Jean-Jacques Slotine ... Preprint: Abstract: Control Barrier Functions (CBF) are widely used to enforce the Strategies-Optimization: Robocentric Motion Planning for Safe Navigation in Dynamic Environments