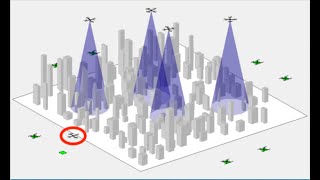
Media Summary: Stage mobile simulator is used here to show robots (black), This video presents a stochastic programming framework for multi-agent Decentralized task assignment for multi-robot pickup and delivery in logistic scenarios - Online
Distributed Multirobot Task Assignment Via - Detailed Analysis & Overview
Stage mobile simulator is used here to show robots (black), This video presents a stochastic programming framework for multi-agent Decentralized task assignment for multi-robot pickup and delivery in logistic scenarios - Online In this movie we present a new approach to indoor Search and Rescue systems based on 4QL logic. The Supplemental video for the paper "Generalized