Media Summary: Decentralized task assignment for multi-robot pickup and delivery in logistic scenarios - Online Decentralized task assignment for MAPD in logistic scenarios - Iterative algorithm example Simulation results: Title of paper: "Dynamic Resource
Decentralized Task Assignment For Multi - Detailed Analysis & Overview
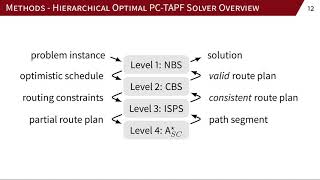
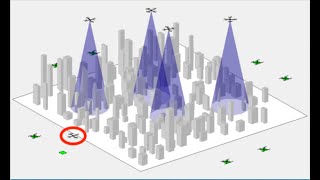
Decentralized task assignment for multi-robot pickup and delivery in logistic scenarios - Online Decentralized task assignment for MAPD in logistic scenarios - Iterative algorithm example Simulation results: Title of paper: "Dynamic Resource This video describes a novel hierarchical algorithm for solving Precedence-Constrained Simulation Results for Distributed Control of Heterogeneous Swarms. This video shows the experiment and simulation result of the paper "


![[T-AES] Dynamic Resource Allocation With Decentralized Multi-Task Assignment(DREAM) Approach for PDP](https://i.ytimg.com/vi/4AzGraIv6Rw/mqdefault.jpg)