Media Summary: UGV with localization under rugged environment. Video accompanying the paper: "Humanoid Navigation in Uneven The modified controller can allow overcoming obstacles under 15 cm for Unitree A1 dog. The core controller is
Dem Based Traversability Map Generation - Detailed Analysis & Overview
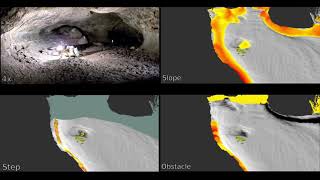
UGV with localization under rugged environment. Video accompanying the paper: "Humanoid Navigation in Uneven The modified controller can allow overcoming obstacles under 15 cm for Unitree A1 dog. The core controller is Mind the Gap: Detection and Traversability Analysis of Terrain Gaps using LIDAR for Learn how to generate high-quality Digital Elevation Models ( Understanding Elevation Models – DSM, DTM, and
Abstact: Autonomous navigation in off-road conditions requires an accurate estimation of David D. Fan*, Kyohei Otsu*, Yuki Kubo, Anushri Dixit, Joel Burdick, and Ali-Akbar Agha-Mohammadi, "STEP: Stochastic ...