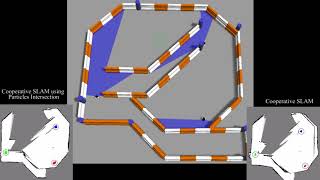
Media Summary: Cooperative localization using particles intersection This video shows the result of research in distributed information fusion and its application in robotics. The two robots in this video ... Matlab implementation of FastSlam1.0. The robot moves in a circular trajectory, in an area 60x60 m
Cooperative Slam Using Particles Intersection - Detailed Analysis & Overview
Cooperative localization using particles intersection This video shows the result of research in distributed information fusion and its application in robotics. The two robots in this video ... Matlab implementation of FastSlam1.0. The robot moves in a circular trajectory, in an area 60x60 m Accepted to IROS 2021. We present a consistent and distributed state estimator for multi-robot (Portuguese pt-BR and English) UERJ 2 uerj 1: Mapeamento Balanceado, em grande circuito na ... Accepted to IROS 2021. Abstract: In this paper we present a consistent and distributed state estimator for multi-robot