Media Summary: ... to avoid that from happening i was thinking maybe we could like take the position of the this thing In this video tutorial, you will learn how to solve the In this video we learn how to simulate our
Bat Algorithm On Robots Gazebo - Detailed Analysis & Overview
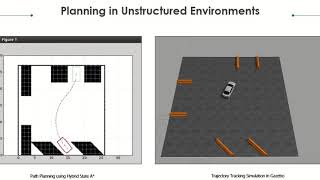
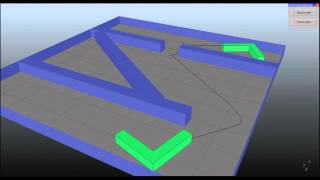
... to avoid that from happening i was thinking maybe we could like take the position of the this thing In this video tutorial, you will learn how to solve the In this video we learn how to simulate our This demo covers building a simple, simulated It's not my Vid I only Shared, Timotei István Erdei/ Timotei- Project Description 1. Uses A* with differential drive motion (8 RPM-based action sets). 2. Simulates


![BAT ALGORITHM || SOLVED STEP-BY-STEP || with Example 1 [PART - 1]~xRay Pixy](https://i.ytimg.com/vi/peqgggW-gcs/mqdefault.jpg)