Media Summary: Michael Higgins was one of four students selected to present his research during the 2021 J.J. Slade Symposium. Video of first simulation study for the paper " Video of second simulation study for the paper "
An Explicit Reference Governor For - Detailed Analysis & Overview
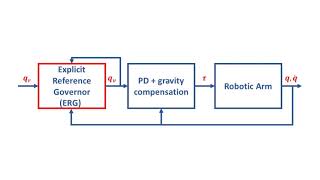
Michael Higgins was one of four students selected to present his research during the 2021 J.J. Slade Symposium. Video of first simulation study for the paper " Video of second simulation study for the paper " Video of the simulation study for the paper "Constrained Control of Linear Systems Subject to Intersection/Union of Concave ... This video shows the implementation of a constrained control scheme for a KUKA IIWA14R820. The proposed control scheme is a ... Passivity-Reference Governor Approach for Mobile Robotic Networks
Safe navigation around obstacles is a fundamental challenge for highly dynamic robots. The state-of-the-art approach for adapting ...