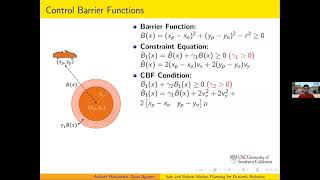
Media Summary: Preprint: Abstract: Control Barrier Functions (CBF) are widely used to enforce the Peter Stone, The University of Texas at Austin Title: Task- Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ...
Safe Robot Navigation Using Motion - Detailed Analysis & Overview
Preprint: Abstract: Control Barrier Functions (CBF) are widely used to enforce the Peter Stone, The University of Texas at Austin Title: Task- Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ... Ever wondered how self-driving cars avoid sudden obstacles or factory Full Paper: Author: Guangyi Liu*, Wen Jiang*, Boshu Lei*, Vivek Pandey, Kostas Daniilidis and ...