Media Summary: e-Seminar on Scientific Machine Learning Speaker: Dr. Jan Drgona (PNNL) Abstract: In this talk, we will present a Q. Le Lidec, I. Kalevatykh, I. Laptev, C. Schmid and J. Carpentier, " Description: In this talk, we will present a
Add Analytically Differentiable Dynamics For - Detailed Analysis & Overview
e-Seminar on Scientific Machine Learning Speaker: Dr. Jan Drgona (PNNL) Abstract: In this talk, we will present a Q. Le Lidec, I. Kalevatykh, I. Laptev, C. Schmid and J. Carpentier, " Description: In this talk, we will present a Presentation for ICML 2021 paper "PODS: Policy Optimization via This is the supplementary video for our paper describing In Fall 2020 and Spring 2021, this was MIT's 18.337J/6.338J: Parallel Computing and Scientific Machine Learning course.
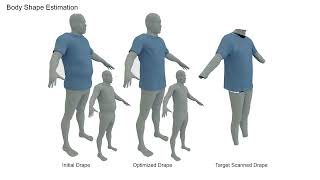
Jan Drgona, Pacific Northwest National Laboratory July 10, 2024 Fourth Symposium on Machine Learning and Tuur Stuyck and Hsiao-yu Chen Symposium on Computer Animation (SCA) 2023 Paper link : We ... Video abstract for "Discovering Governing Equations from Partial Measurements with Deep Delay Autoencoders" by Joseph ...