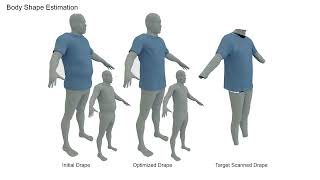
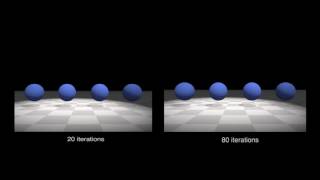
Media Summary: Tuur Stuyck and Hsiao-yu Chen Symposium on Computer Animation (SCA) 2023 Paper link : We ... We finally solved the long-standing problem of iteration count and time step dependent constraint stiffness in ACM Transactions on Graphics (TOG)/SIGGRAPH 2022 Relevant link: Project page:
Diffxpbd Differentiable Position Based Simulation - Detailed Analysis & Overview
Tuur Stuyck and Hsiao-yu Chen Symposium on Computer Animation (SCA) 2023 Paper link : We ... We finally solved the long-standing problem of iteration count and time step dependent constraint stiffness in ACM Transactions on Graphics (TOG)/SIGGRAPH 2022 Relevant link: Project page: Authors: Yi-Ling Qiao, Junbang Liang, Vladlen Koltun, Ming C. Lin Github: Paper: ... For the tutorial notes and the source html code and all other tutorials see ... We propose a computational design pipeline for pneumatically-actuated soft robots interacting with their environment through ...
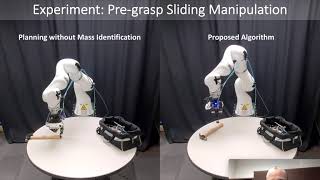
For the source html code and all other tutorials see In this ... Model Identification for Robotic Manipulation. Saint Venant kirchoff finite elements method (FEM) vertex 2601 element 5000. e-Seminar on Scientific Machine Learning Speaker: Dr. Jan Drgona (PNNL) Abstract: In this talk, we will present a 00:00 intro 05:05 first research problems 07:45 convex vs nonconvex 11:02 discrete collision detection 16:37