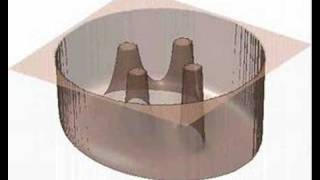
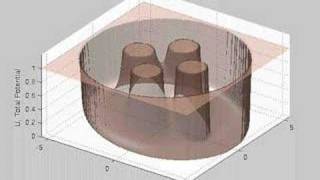
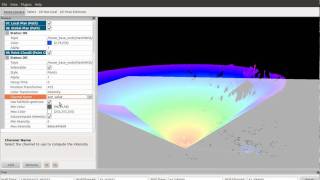
Media Summary: This video shows a robot moving in a maze. A camera is used to localize the robot, via color segmentation (in YCrCb color space). Potential Field and Navigation Function Controls Experimental Tests for Collision Avoidance by UGV Using
Visualization Navigation Function V0 1 - Detailed Analysis & Overview
This video shows a robot moving in a maze. A camera is used to localize the robot, via color segmentation (in YCrCb color space). Potential Field and Navigation Function Controls Experimental Tests for Collision Avoidance by UGV Using And we will continue with that discussion today then we will look at path planning using a