Media Summary: eXactoPOSE is a robot control technology that allows the robot to fuse sensor data from multiple sources of position and force ... To bring about a new era in industrial robotics by overcoming challenges such as high costs, restrictive environment, and safety ... In our recent submission to the 2016 International Conference on Robotics and Automation (ICRA), we proposed an online,
Visual Servoing Based Active Vision - Detailed Analysis & Overview
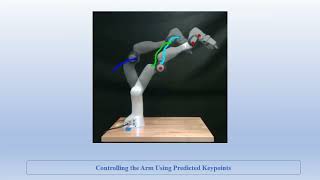
eXactoPOSE is a robot control technology that allows the robot to fuse sensor data from multiple sources of position and force ... To bring about a new era in industrial robotics by overcoming challenges such as high costs, restrictive environment, and safety ... In our recent submission to the 2016 International Conference on Robotics and Automation (ICRA), we proposed an online, Video attachment for the PhD dissertation at A demonstration of a control method known as This video is a supplementary material for the following paper: Keypoints-