Media Summary: Ever wondered how robots and autonomous systems navigate their environment 0:00 intro 0:10 start 2:16 map build In this video, I test my custom C++ LiDAR SLAM pipeline on the MulRan DCC01 sequence, ... Ever wondered how robots navigate complex environments without getting lost or mapping inaccuracies? This video dives into ...
Visual Loop Closure Using Qlzm - Detailed Analysis & Overview
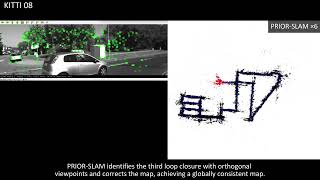
Ever wondered how robots and autonomous systems navigate their environment 0:00 intro 0:10 start 2:16 map build In this video, I test my custom C++ LiDAR SLAM pipeline on the MulRan DCC01 sequence, ... Ever wondered how robots navigate complex environments without getting lost or mapping inaccuracies? This video dives into ... Ever wondered why some robotic mapping systems are more accurate than others? This video delves into the crucial concept of ... Sequence shows how frame dropping and blur trigger the true scale relocalization mechanism. The final frames show the online ... Description (0:02--1:02) Experimental Results (1:02--1:32)
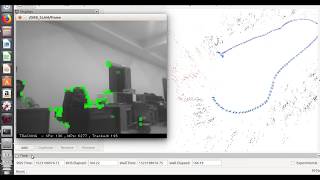
Here the Experiment is performed while some of the objects were placed on table. when the table re-appeared in the scene.