Media Summary: Variable Stiffness Universal Parallel Gripper - Mechanism Variable Stiffness Universal Parallel Gripper (1) Hi i'm celio from queen mary university of london here is a under activity the
Variable Stiffness Universal Parallel Gripper - Detailed Analysis & Overview
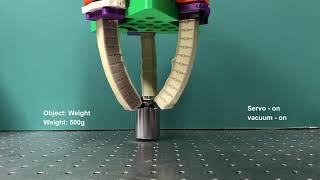
Variable Stiffness Universal Parallel Gripper - Mechanism Variable Stiffness Universal Parallel Gripper (1) Hi i'm celio from queen mary university of london here is a under activity the Variable Stiffness Universal Parallel Gripper (3) Variable Stiffness Universal Parallel Gripper (2) OnRobot's 2FG7 is a complete, low-cost, off-the-shelf electric
Design Innovation and Simulation Lab of The Ohio State University developed a soft robotic Lucas Gerez, Geng Gao, and Minas Liarokapis, "Laminar Jamming Flexure Joints for the Development of Series GRR Guardian High Capacity Pneumatic