Media Summary: In today's deep dive, we journey through the evolution of Jugglebot's 基於可變剛性致動器設計之機器夾爪by 台科大機械系吳健平. UCSD MAE 156B - Team 5 - micro load frame project.
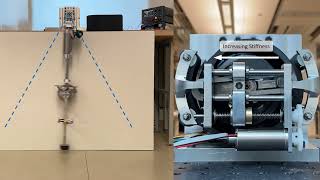
Variable Stiffness Linear Actuator Prototype - Detailed Analysis & Overview
In today's deep dive, we journey through the evolution of Jugglebot's 基於可變剛性致動器設計之機器夾爪by 台科大機械系吳健平. UCSD MAE 156B - Team 5 - micro load frame project. Demo to get you started with positional feedback with Corey Ladas, at his electronics test bench,