Media Summary: Value Functions are Control Barrier Functions WFVML, ICML 2023 Control Barrier Function In Action (Obstacle Avoidance) MAE 207 Safety for Autonomous Systems Guest Lecturer: Jason Choi, UC Berkeley,
Value Functions Are Control Barrier - Detailed Analysis & Overview
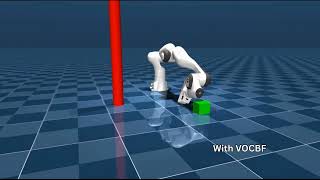
Value Functions are Control Barrier Functions WFVML, ICML 2023 Control Barrier Function In Action (Obstacle Avoidance) MAE 207 Safety for Autonomous Systems Guest Lecturer: Jason Choi, UC Berkeley, This colloquium, held by Assistant Prof. Federico Califano at Robotics and Mechatronics (RaM) group (), ... Presentation for the IEEE International Conference on Robotics and Automation (ICRA) 2021. Paper available at: ... This project demonstrates a learning-based safety framework for robotic manipulation using
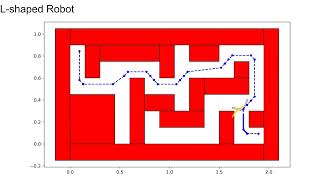
Obstacle avoidance between polytopes is a challenging topic for optimal 1-min supplementary video to the figures in the following paper: Sander Tonkens and Sylvia Herbert, "Refining