Media Summary: Spotlight talk at 3nd Workshop on Representing and Manipulating Video for ICRA 2023 Paper "Learning to Estimate 3-D States of This video accompanies our paper, "TrackDLO: Tracking
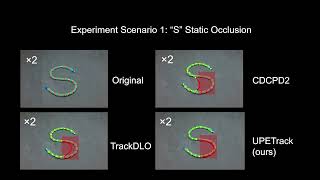
Upetrack Occluded Deformable Linear Objects - Detailed Analysis & Overview
Spotlight talk at 3nd Workshop on Representing and Manipulating Video for ICRA 2023 Paper "Learning to Estimate 3-D States of This video accompanies our paper, "TrackDLO: Tracking Video accompanying the paper "Tracking Partially- IEEE Robotics and Automation Letters (RA-L) 2024 Abstract: Manipulating Spotlight talk at 4th Workshop on Representing and Manipulating
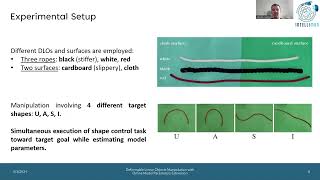
This work introduces an analytical approach for detecting and estimating external forces acting on