Media Summary: Supplementary video for 'Artificial Lateral Line Based Longitudinal Separation Sensing for Two robot exploration with passive collision avoidance J. Alonso-Mora, A. Breitenmoser, M. Rufli, P. Beardsley, R. Siegwart, Proceedings of the 10th International Symposium on ...
Two Robotic Fish Collision Avoidance - Detailed Analysis & Overview
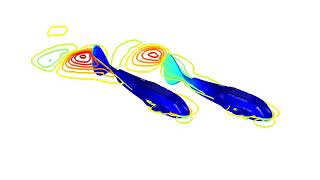
Supplementary video for 'Artificial Lateral Line Based Longitudinal Separation Sensing for Two robot exploration with passive collision avoidance J. Alonso-Mora, A. Breitenmoser, M. Rufli, P. Beardsley, R. Siegwart, Proceedings of the 10th International Symposium on ... Weakly electric fishes (Gymnotid and Mormyrid) use an electric field to communicate effi-ciently (termed electrocommunication) in ... Liang Li*, Xingwen Zheng*, Rui Mao, et al., Energy saving of schooling Energid Technologies demonstrating multi-