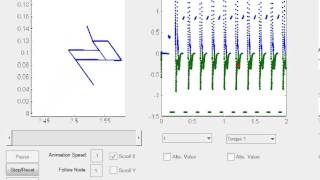
Media Summary: Author : Wang Xingxing Tool : ADAMS + Simulink Created Time : 2014 Shanghai University. Author : Wang Xingxing Tool : ADAMS + Simulink Created Time : 2013.12 Shanghai University. In the video, we achieve control over different
Two Legged Robot Simulation Hopping - Detailed Analysis & Overview
Author : Wang Xingxing Tool : ADAMS + Simulink Created Time : 2014 Shanghai University. Author : Wang Xingxing Tool : ADAMS + Simulink Created Time : 2013.12 Shanghai University. In the video, we achieve control over different Committed to motion optimization and dynamic control of Retraction Jump - 20kg 2D platform with front leg