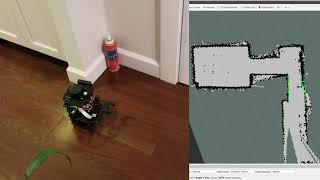
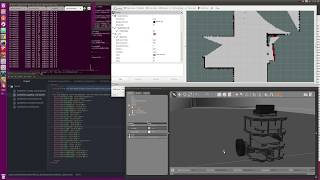
Media Summary: This is a simulation demonstration of building an occupancy grid The following selected individual projects are included in the video. 1. Optical-Flow implementation for robot localization 2. SLAM using Turtlebot3 Waffle and Gmapping
Turtlebot3 Waffle Map Exploration Using - Detailed Analysis & Overview
This is a simulation demonstration of building an occupancy grid The following selected individual projects are included in the video. 1. Optical-Flow implementation for robot localization 2. SLAM using Turtlebot3 Waffle and Gmapping Turtlebot3 Waffle Navigation Using ROS2 - Wall Following Algorithm - Test Video