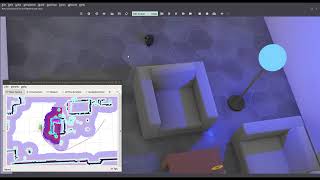
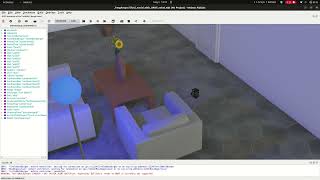
Media Summary: This video shows Navigation2 package for ROS2 used to control I have implemented a (Extended) Kalman Filter-based Control of Mobile Robotics CDA4621 Lab 5 -
Turtlebot3 Localization In Webots - Detailed Analysis & Overview
This video shows Navigation2 package for ROS2 used to control I have implemented a (Extended) Kalman Filter-based Control of Mobile Robotics CDA4621 Lab 5 - Continuing my journey in Robotics Simulation! As the next step in my exploration, I worked on Simultaneous (English description) In this lecture, you can learn: - Introduction to This project was made as a master thesis project at Université Libre de Bruxelles (ULB) together with the Machine Learning Group ...
The previously named 'Position Control' example has been renamed to 'Relative Move'. In this video, we demonstrate relative ...