Media Summary: Alright then this is what we did just now alright so the single X is continuous move so starts movement with the program speeds ... ... everything is sent to the EtherCAT telegram so you have only one Are you a user of NI LabVIEW with no access to a robust motion control software? Look no further than the
Trio Motion Tutorial Chapter07 Motion1 - Detailed Analysis & Overview
Alright then this is what we did just now alright so the single X is continuous move so starts movement with the program speeds ... ... everything is sent to the EtherCAT telegram so you have only one Are you a user of NI LabVIEW with no access to a robust motion control software? Look no further than the Unlike the connect the operating in encoder counts so the final position of the movement will be the end position in the table ... ... so you can if you put a rap T's on program that means it will repeat that Want more information or have a project and need help? Contact Us today!
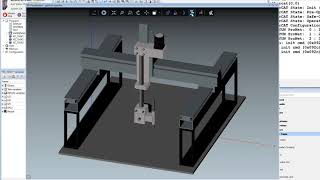
Okay so in the multitasking itself we tend to run obviously we do those and so we're controlled and ... drive and fetch them by the ethercat master in the ... little bit weird this 3d simulation because it doesn't form it is in the project it's part of