Media Summary: Supplementary video for the IEEE RA-L paper "RL + Model-based Control: Preprint: Abstract: Adaptive control can help a control system compensating for model uncertainty ... Supplementary video for the IROS 2022 paper "Animal Motions on
Towards Versatile Legged Robots Through - Detailed Analysis & Overview
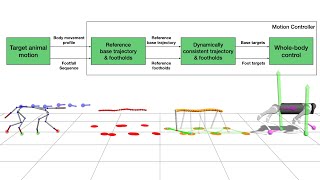
Supplementary video for the IEEE RA-L paper "RL + Model-based Control: Preprint: Abstract: Adaptive control can help a control system compensating for model uncertainty ... Supplementary video for the IROS 2022 paper "Animal Motions on Traiko Dinev, Carlos Mastalli, Vladimir Ivan, Steve Tonneau and Sethu Vijayakumar, A Presentation for the IROS 2022 paper "Animal Motions on Talk from the IROS 2021 workshop: From gears to direct drive: Recent trends and opportunities in actuation Website: ...
Abstract: Loco-manipulation planning skills are pivotal for expanding the utility of