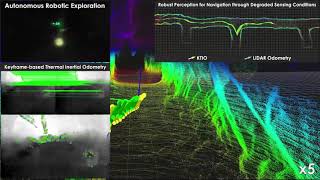
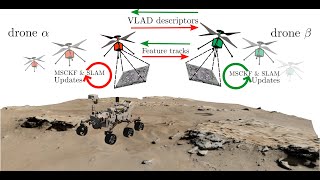
Media Summary: Autonomous navigation of Micro Aerial Vehicles in GPS-denied environments that are simultaneously visually-degraded is ... In this work we present a method for fusion of direct radiometric data from a We propose a system solution to achieve data-efficient, decentralized state estimation for a team of flying robots using
Thermal Odometry - Detailed Analysis & Overview
Autonomous navigation of Micro Aerial Vehicles in GPS-denied environments that are simultaneously visually-degraded is ... In this work we present a method for fusion of direct radiometric data from a We propose a system solution to achieve data-efficient, decentralized state estimation for a team of flying robots using Shibo Zhao, Peng Wang, Hengrui Zhang, Zheng Fang, Sebastian Scherer. TP-TIO: A Robust In this work we present a multi--sensor fusion algorithm for reliable To achieve robust motion estimation in visually degraded environments,
Contributions: 1. The first tightly coupled deep

![[IROS22] STheReO: Stereo Thermal Dataset for Research in Odometry and Mapping](https://i.ytimg.com/vi/U81_vpHymAA/mqdefault.jpg)






![[IROS 2020] TP-TIO: A Robust Thermal-Inertial Odometry with Deep ThermalPoint](https://i.ytimg.com/vi/aa4whgmYTqY/mqdefault.jpg)
