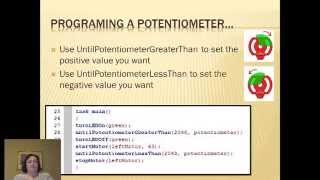
Media Summary: How to use RobotC to program a potentiometer to turn on and off a motor. In this case the potentiometer is being used like a ... How to use RobotC to do basic motor programming. How to use RobotC to program a while loop into a potentiometer command. This allows code to be repeated over and over again.
Testbed 2014 Task 6 - Detailed Analysis & Overview
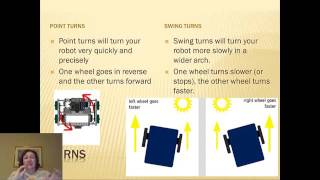
How to use RobotC to program a potentiometer to turn on and off a motor. In this case the potentiometer is being used like a ... How to use RobotC to do basic motor programming. How to use RobotC to program a while loop into a potentiometer command. This allows code to be repeated over and over again. Wait 5.0 means wait five seconds stop the motor the How to get RobotC to run a motor backwards. Using RobotC to simulate point turns and swing turns with a VEX
... program a switch you can add an until touch which will make your How to use RobotC to program a VEX Potentiometer to turn a motor on and off.