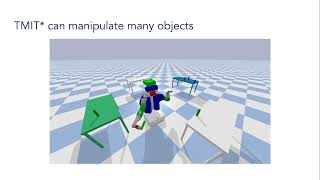
Media Summary: A presentation for our RA-L 2022 paper, " This video shows an improvement to the popular RRT* planning algorithm that focusses the search area by eliminating some ... MIT - April 12, 2024 Speaker: Florian Shkurti Seminar title: Learning to Plan and Perceive for
Task And Motion Informed Trees - Detailed Analysis & Overview
A presentation for our RA-L 2022 paper, " This video shows an improvement to the popular RRT* planning algorithm that focusses the search area by eliminating some ... MIT - April 12, 2024 Speaker: Florian Shkurti Seminar title: Learning to Plan and Perceive for Supplementary video for the IROS 2023 paper "Differentiable A video for our ICRA 2025 paper, "Nearest-Neighbourless Asymptotically Optimal Authors. Naruki Yoshikawa, Andrew Zou Li, Kourosh Darvish, Yuchi Zhao, Haoping Xu, Artur Kuramshin, Alan Aspuru-Guzik, ...
A video for our ICRA 2020 paper, "Adaptively Project Website: The project report, videos and additional details are listed ... Many exciting robotic applications require multiple robots with many degrees of freedom, such as manipulators, to coordinate their ...