Media Summary: This project is actively being worked on. This is a Welcome to TechLab ! How do robots explore unknown environments and build maps on their own? In this complete ... Thanks to Jane Street for their support... Check out internships here: More links & stuff in full ...
Superflow Barebones Slam Frontend Using - Detailed Analysis & Overview
This project is actively being worked on. This is a Welcome to TechLab ! How do robots explore unknown environments and build maps on their own? In this complete ... Thanks to Jane Street for their support... Check out internships here: More links & stuff in full ... UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". Abstract: Mixed Reality and Robotics require robust Simultaneous Localization and Mapping ( This work aims to implement a robust Simultaneous Localization and Mapping algorithm on a turtlebot platform
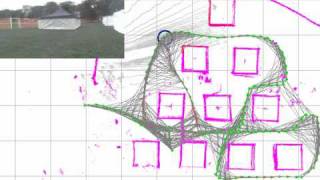
In this tutorial, you will learn how to perform Each robot maintains a map of the world according to its own sensors. Our maps are high-quality due to laser scan matching and ... Henrik Kretzschmar and Cyrill Stachniss Information-Theoretic Compression of Pose Graphs for Laser-Based