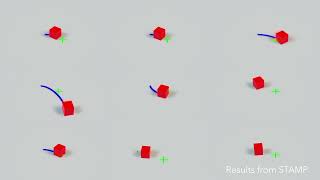
Media Summary: STAMP: Differentiable Task and Motion Planning via Stein Variational Gradient Descent Supplementary video for the IROS 2023 paper " MIT - April 12, 2024 Speaker: Florian Shkurti Seminar title: Learning to Plan and Perceive for
Stamp Differentiable Task And Motion - Detailed Analysis & Overview
STAMP: Differentiable Task and Motion Planning via Stein Variational Gradient Descent Supplementary video for the IROS 2023 paper " MIT - April 12, 2024 Speaker: Florian Shkurti Seminar title: Learning to Plan and Perceive for Talk abstract: In robotics and more specifically Jung-Su Ha and Danny Driess and Marc Toussaint Machine Learning & Robotics Lab, University Stuttgart Physical Reasoning ... This video is a supplement to the paper: M. Toussaint, K. R. Allen, K. A. Smith, and J. B. Tenenbaum:
PDF: Authors: Ajay Sathya, Vahid Mokhtari, Wilm ... Imitation learning is a powerful tool for training robot manipulation policies, allowing them to learn from expert demonstrations ... Pushing the Boundaries of Asymptotic Optimality in Integrated A talk by Erik Demaine presented live at the 23rd Thailand-Japan Conference on Discrete and Computational Geometry, Graphs, ... This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ...