Media Summary: December 8, 2023 Luca Carlone, MIT A large gap still separates Speaker: Luca Carlone, Massachusetts Institute of Technology. Bay Area Vision Meeting (more info below)
Spatial Perception For Robots And - Detailed Analysis & Overview
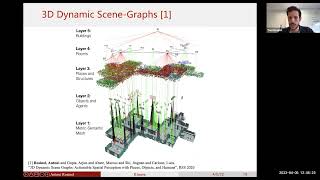
December 8, 2023 Luca Carlone, MIT A large gap still separates Speaker: Luca Carlone, Massachusetts Institute of Technology. Bay Area Vision Meeting (more info below) Experimental Results for the paper: "Foundations of May 10, 2019 Luca Carlone Assistant Professor, Department of Aeronautics and Astronautics, MIT. Hierarchical 3D Scene Graphs (3DSG) have emerged as an actionable and scalable representation for long-term autonomy ...