Media Summary: DCSLAM : A Dynamically Constrained real-time Fangwei Zhong, Sheng Wang, Ziqi Zhang, Chen Zhou, Yizhou Wang Although significant progress has been made in robot ... Video supplement to the ICRA 2020 submission "Probabilistic Data Association via Mixture
Slam With Object Discovery Modeling - Detailed Analysis & Overview
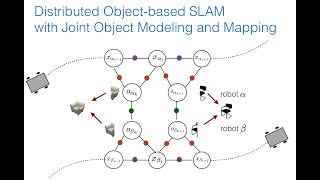
DCSLAM : A Dynamically Constrained real-time Fangwei Zhong, Sheng Wang, Ziqi Zhang, Chen Zhou, Yizhou Wang Although significant progress has been made in robot ... Video supplement to the ICRA 2020 submission "Probabilistic Data Association via Mixture We extend the previous work on Distributed