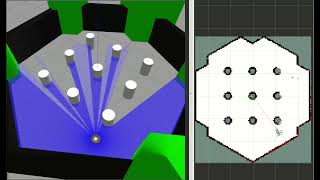
Media Summary: In this tutorial, you will learn how to perform Scan Matching Based SLAM With Gaussian Approximation on Turtlebot3 simulator Virtual SLAM - TurtleBot3 Waffle-pi Simulation
Slam Simulation On Turtlebot3 With - Detailed Analysis & Overview
In this tutorial, you will learn how to perform Scan Matching Based SLAM With Gaussian Approximation on Turtlebot3 simulator Virtual SLAM - TurtleBot3 Waffle-pi Simulation UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". Use Turtlebot3 with SLAM approach to create and save a map








![[Turtlebot3] SLAM Simulation](https://i.ytimg.com/vi/tn_8lIsnEvs/mqdefault.jpg)
![ROS 2 | TurtleBot3 SLAM and Autonomous Navigation with Sim2Real Transfer [Tutorial]](https://i.ytimg.com/vi/-4Ewuhfgbx8/mqdefault.jpg)

