Media Summary: ECE 5335/6325 State-Space Control Systems, University of Houston. Single robot trajectory tracking via model predictive control (MPC) in presence of static obstacles Paper title: "A Real-Time Affordable Predictive
Single Robot Trajectory Tracking Via - Detailed Analysis & Overview
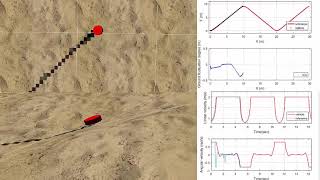
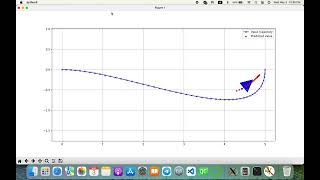
ECE 5335/6325 State-Space Control Systems, University of Houston. Single robot trajectory tracking via model predictive control (MPC) in presence of static obstacles Paper title: "A Real-Time Affordable Predictive Localization: Uses four ArUco markers as reference points and IEEE RAL 2025: Abstract—This letter presents a comprehensive comparative study of Incremental Nonlinear Dynamic Inversion ... This is just a demonstration. Here my GitHub:
Neural network and dynamic feedback linearization are used in the feedback error learning (FEL) structure for Trajectory Tracking Using a Multi-tendon Continuum Robot with Stereo Vision and 3D Reconstruction