Media Summary: Similar to the first run, with recharged batteries. MAVLab TUDelft - ESA Advanced Concepts Team Our work can be found in the following publications: ... Check out the other videos in the series: Part 1 ...
Simulated Optimal Control For Quadcopter - Detailed Analysis & Overview
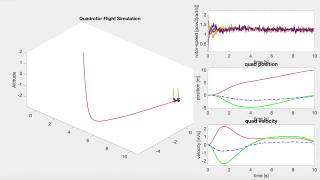
Similar to the first run, with recharged batteries. MAVLab TUDelft - ESA Advanced Concepts Team Our work can be found in the following publications: ... Check out the other videos in the series: Part 1 ... This two-hour video is the most comprehensive and detailed video available anywhere on Free MATLAB Trial: Request a Quote: Contact Us: This session ... The quadrotor tracks the centroid of a formation of iRobot Creates. The quadrotor is running a L1