Media Summary: Note 1: the edge distance is set to 0.4 m. Note 2: the distance is measured through Sonar Sensors (as I was asked in my project), ... Car-like robot obstacle avoidance with fuzzy control 1/5 Get instant access to MATLAB & Simulink books, guides, and course files to boost your skills! Get Access Now: ...
Simple Obstacle Avoidance With Fuzzy - Detailed Analysis & Overview
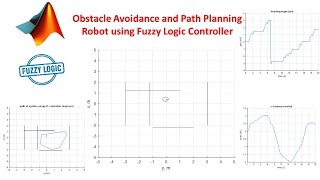
Note 1: the edge distance is set to 0.4 m. Note 2: the distance is measured through Sonar Sensors (as I was asked in my project), ... Car-like robot obstacle avoidance with fuzzy control 1/5 Get instant access to MATLAB & Simulink books, guides, and course files to boost your skills! Get Access Now: ... Car-like robot obstacle avoidance with the immune fuzzy Qlearning control 4/5 Johnny is an autonomous robot built with the aim of exploring unknown environments Mobile Robot Obstacle Avoidance Behavior Using Fuzzy Logic Controller
Obstacle avoiding robot using fuzzy logic