Media Summary: In this paper, we describe the conceptual design and implementation of the Soft Compliant Manipulator for Broad Applications ... Puspita Triana Dewi, Priyanka Rao, and Jessica Burgner-Kahrs: A Lightweight Priyanka Rao, Quentin Peyron, Jessica Burgner-Kahrs: Shape Representation and Modeling of
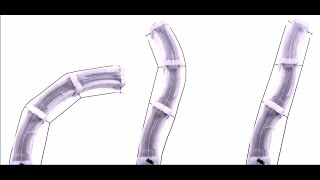
Simba Tendon Driven Modular Continuum - Detailed Analysis & Overview
In this paper, we describe the conceptual design and implementation of the Soft Compliant Manipulator for Broad Applications ... Puspita Triana Dewi, Priyanka Rao, and Jessica Burgner-Kahrs: A Lightweight Priyanka Rao, Quentin Peyron, Jessica Burgner-Kahrs: Shape Representation and Modeling of New motion concept for safe robotics using Demonstration: Task space manipulation of Spring Compliant This project focuses on the development of a soft-rigid