Media Summary: Workshop: Infer2Control (NeurIPS 2018) Session: Invited Talk Speaker: Abstract: One of the most remarkable things about the most recent generative machine learning systems is their ability to produce ... Physics in Machine Learning Workshop May 29, 2019
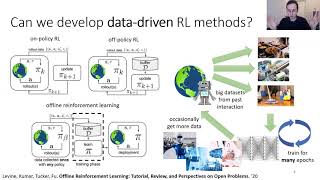
Sergey Levine Control As Inference - Detailed Analysis & Overview
Workshop: Infer2Control (NeurIPS 2018) Session: Invited Talk Speaker: Abstract: One of the most remarkable things about the most recent generative machine learning systems is their ability to produce ... Physics in Machine Learning Workshop May 29, 2019 For more information about Stanford's Artificial Intelligence professional and graduate programs, visit: All right so so far we saw how we could frame