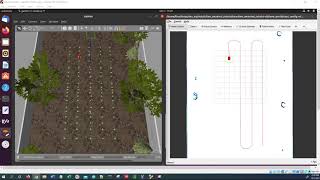
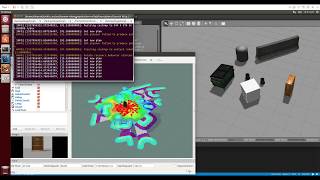
Media Summary: Sending Goals To Navigation Stack Turtlebot3 Custom World In this video we're going to show you how to Perform SLAM and send goals to ROS navigation stack setup with 2 turtlebots
Sending Goals To Navigation Stack - Detailed Analysis & Overview
Sending Goals To Navigation Stack Turtlebot3 Custom World In this video we're going to show you how to Perform SLAM and send goals to ROS navigation stack setup with 2 turtlebots Download the completed project here: Other parts in Project 9: Introduction: ... This ROS2 Nav2 crash course will get you started with the Learn all about NavigationStack in SwiftUI, the powerful tool for managing
Get points from point tool in rviz and subscribe from topic and pipline to text file then launch our move_base action client and

![[ROS Q&A] 175 - Sending Goals to the Navigation Stack using Waypoints](https://i.ytimg.com/vi/Zjb_2krr1Xg/mqdefault.jpg)




![ROS2 Nav2 - Navigation Stack in 1 Hour [Crash Course]](https://i.ytimg.com/vi/idQb2pB-h2Q/mqdefault.jpg)