Media Summary: ICRA paper link: Arxiv paper link: Result ... ICRA 2018 Spotlight Video Interactive Session Thu PM Pod O.8 Authors: Zeng, Zhen; Zhou, Zheming; Sui, Zhiqiang; Jenkins, ... Abstract: The visions of interconnected heterogeneous autonomous
Semantic Robot Programming For Goal - Detailed Analysis & Overview
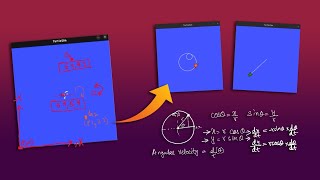
ICRA paper link: Arxiv paper link: Result ... ICRA 2018 Spotlight Video Interactive Session Thu PM Pod O.8 Authors: Zeng, Zhen; Zhou, Zheming; Sui, Zhiqiang; Jenkins, ... Abstract: The visions of interconnected heterogeneous autonomous Abstract: We develop a general control framework where a low-level optimizer is built into the Euclidean distance is explained in step by step approach using ROS2 package turtlesim. In path planning, the Euclidean distance ... We present Language Frontier Guide (LFG), an algorithm for guiding real-world
Paper accepted at IROS 2019 Authors: Saeid Amiri, Sujay Bajracharya, Cihangir Goktolga, Jesse Thomason, and Shiqi Zhang.