Media Summary: Robonaut model, under Actin control, showing The presented video material is a part of the 'Factory in a Day' project. The PR2 Robot in ... The presented video material is a part of the 'Factory in a Day' project. The PR2 ...
Self Collision Avoidance Using Task - Detailed Analysis & Overview
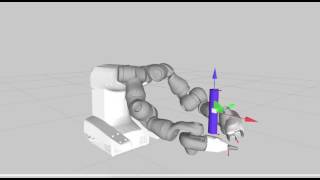
Robonaut model, under Actin control, showing The presented video material is a part of the 'Factory in a Day' project. The PR2 Robot in ... The presented video material is a part of the 'Factory in a Day' project. The PR2 ... Richard Cockburn Maclaurin Professor of Aeronautics and Astronautics Read full story here: Fixed targets for both arms (yellow points); active TUM Praktikum - Bau eines modularen Roboters (IN0012,IN2106, IN4231)
12-DoF robot arm, in simulation under Actin control, showing ... the EU-project CROPS) showing its model for We present an approach for retartgeting off-the-shelf Virtual Reality (VR) trackers to effectively teleoperate an upper-body ...