Media Summary: Speaker: Nacim Meslem (Grenoble Institute of Technology, France) Abstract: Based on consistency techniques, a set-valued ... This video shows the results of our papers titled " A talk recorded for the IEEE Conference on Decision and Control 2020. Paper: A
Secure State Estimation Algorithm For - Detailed Analysis & Overview
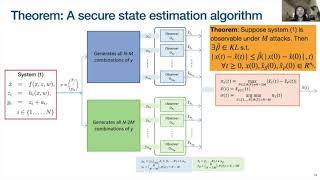
Speaker: Nacim Meslem (Grenoble Institute of Technology, France) Abstract: Based on consistency techniques, a set-valued ... This video shows the results of our papers titled " A talk recorded for the IEEE Conference on Decision and Control 2020. Paper: A Autonomy Talks - 04/07/2023 Speaker: Prof. Michelle Chong, TU Eindhoven Title: By Edmond Rogers, Will Rogers, and Gabe Weaver The recently open sourced Cyber Physical Topology Language (CPTL) has ... Ever wondered how robots precisely know where they are and what they're doing in the world? This video dives into the ...
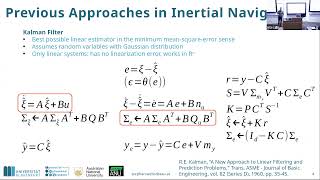
Abstract: The go-to solvers for most optimization problems in robotics are of iterative nature: given an initial guess, update the ... Paulo Tabuada Professor and Vice-Chair UCLA Electrical Engineering Abstract Control systems work silently in the background ... We explore the use of high-performance computing for improving distributed Keynote by Stephan Weiss from the University of Klagenfurt at the "Equivariant Systems: Theory and Applications in