Media Summary: Supplemental material to our SimTrack paper presented at the IEEE/RSJ International Conference on Intelligent Robots and ... this is the work collabrating with my engineer and students. Session: xR engineering Title: MultiCam: On-the-fly
Scalable Multi Camera Object Pose - Detailed Analysis & Overview
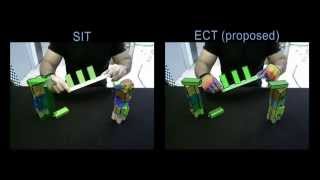
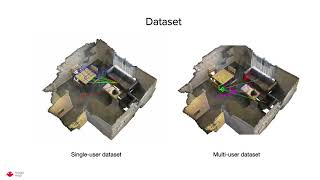
Supplemental material to our SimTrack paper presented at the IEEE/RSJ International Conference on Intelligent Robots and ... this is the work collabrating with my engineer and students. Session: xR engineering Title: MultiCam: On-the-fly Supplementary material for paper: D. Tan, F. Tombari, S. Ilic, N. Navab, "A Versatile Learning-based 3D Temporal Tracker: ... Fourth Workshop on Computer Vision for AR/VR (CV4ARVR) More information at: ... Tracking 5 people in a big room using 5 calibrated and synchronized
Authors: Felix Limanta; Kuniaki Uto; Koichi Shinoda Description: This paper proposes CAMOT, a simple