Media Summary: Svarny, P.; Tesar, M.; Behrens, J. K. & Hoffmann, M. (2019), A long video that reviews our research results over the last 10 years on The video summarizes the state of the on-going research activities on
Safe Physical Human Robot Interaction - Detailed Analysis & Overview
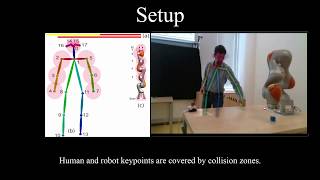
Svarny, P.; Tesar, M.; Behrens, J. K. & Hoffmann, M. (2019), A long video that reviews our research results over the last 10 years on The video summarizes the state of the on-going research activities on Tactile sensor systems integrated in flooring can measure the forces acting on it with a spatial resolution. This kind of flooring ... This video demonstrates the operation of a Series Clutch Actuator (SCA). This device consists of an electronically adjustable ... For details, please check our paper: "A Dynamical System Approach to Task-Adaptation in









![Adaptive physical Human-Robot Interaction using Dynamical Systems [Clearpath Ridgeback]](https://i.ytimg.com/vi/7BjHhV-BkwE/mqdefault.jpg)

