Media Summary: ROS package link: Paper link: ROS package is ... RRT-based Exploration Algorithm in Random Cave Environment [NUC Drone setup] Movement plannification of the Center of Gravity of the humanoid HOAP-
Rrt Map Exploration Three Robots - Detailed Analysis & Overview
ROS package link: Paper link: ROS package is ... RRT-based Exploration Algorithm in Random Cave Environment [NUC Drone setup] Movement plannification of the Center of Gravity of the humanoid HOAP- Source of the algorithm: -- Unicycle-based graph In this ROS open class, you'll learn how to launch multiple This one includes simulation and actual deployment of the




![RRT-based Exploration Algorithm in Random Cave Environment [NUC Drone setup]](https://i.ytimg.com/vi/V1uxSvs6ZLE/mqdefault.jpg)






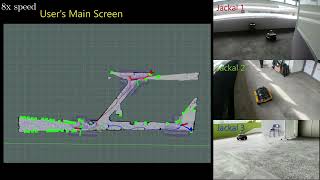
![ROS Developers LIVE-Class #66: [Robot Exploration] Multiple Robots Collaborate to Create a Map](https://i.ytimg.com/vi/G_RhKZUQCkc/mqdefault.jpg)