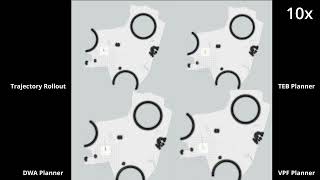
Media Summary: See the other videos in this series: This video ... Side by side comparision of the 4 ROS local Building a robotics product? get our team on board: Solving integration issues with
Ros2 Coverage Path Planning Floor - Detailed Analysis & Overview
See the other videos in this series: This video ... Side by side comparision of the 4 ROS local Building a robotics product? get our team on board: Solving integration issues with Building a robotics product? get our team on board: Ubuntu Version : 22.04 The video displays the modified RM3 robot with the drill attachment used for the navigation simulation. The article{raptis2023end, title={End-to-end Precision Agriculture UAV-Based Functionalities Tailored to Field Characteristics}, ...
This is a brief demo video for the Dynamic Obstacle Layer (DOL) approach, developed upon the NavStack2 in WilsonROS is a Wireless Indoor Localization System on ROS. The Robot Operating System (ROS) is a flexible framework for ...







![[ROS] UAV Coverage Path Planning: Experiment #1](https://i.ytimg.com/vi/Pb-Kr6KKn3Q/mqdefault.jpg)



